I’ve found it convenient to pair FEZ computers (since I prefer writing the interesting software in C# … which is clearer and more maintainable than the Arduino dialect) over a 500kbaud serial line with a Teensy 4.0 (because I’m too lazy to write new hardware drivers every time I buy new hardware.) So far, I haven’t found a downside to this approach, and would be interested to hear about potential problems that I might have missed…
3 Likes
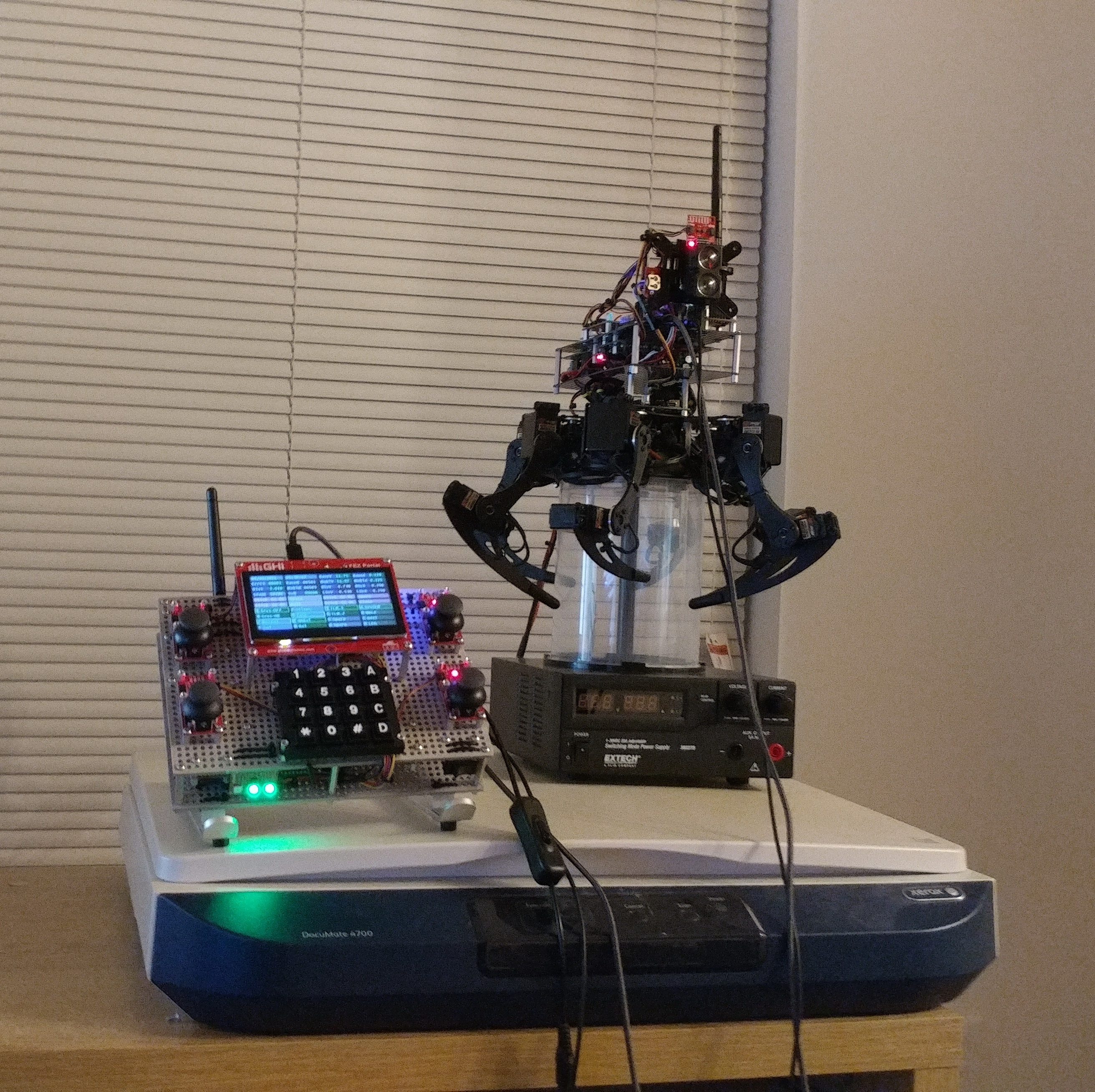
That photo has peaked my interest. Please say more!!
Sure. This is basically a Lynxmotion Phoenix hexapod. These robots are designed to emulate insect gaits, and not much else. My problem is that I have an age-appropriate memory, and can never remember what the game controller button patterns that come with these things are supposed to do. I also find it difficult to keep track of the discharge state of the logic and servo batteries. Finally, I’m annoyed by the latency and the dropped commands, and the fact that the robot doesn’t automatically enter a safe-mode on prolonged disconnect, and doesn’t reconnect with equal facility from the two xceivers. So, I’m sending a regular 80ms pulse from the controller Arduino to the robot Arduino, containing the entire state of the keypad and thumbsticks, and using the nRF24L01+ ack to return data collected from the SparkFun I2C sensors (which I really like.) The FEZ processors are activated by regular interrupt pulses. The robot FEZ does all the trig and matrix math, and writes to the servo controller. The controller FEZ is like an epiphenomenal consciousness: it organizes and displays the commands and telemetry, but its causal relationship with the local Arduino is entirely passive.
1 Like
ha ha. I am going to use this from now on!
1 Like