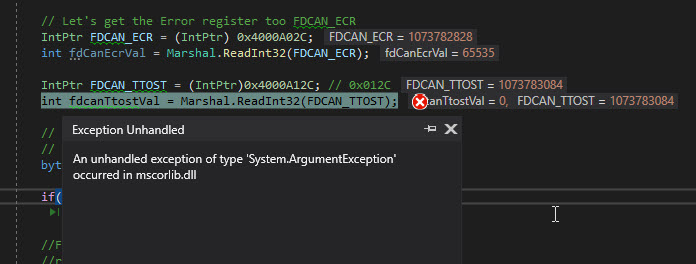
Those are all register you can access. TTOST is not on this list. And I don’t think you can find out something by this register which is only for CAN1.
uint CREL; /*!< FDCAN Core Release register, Address offset: 0x000 */
uint ENDN; /*!< FDCAN Endian register, Address offset: 0x004 */
uint RESERVED1; /*!< Reserved, 0x008 */
uint DBTP; /*!< FDCAN Data Bit Timing & Prescaler register, Address offset: 0x00C */
uint TEST; /*!< FDCAN Test register, Address offset: 0x010 */
uint RWD; /*!< FDCAN RAM Watchdog register, Address offset: 0x014 */
uint CCCR; /*!< FDCAN CC Control register, Address offset: 0x018 */
uint NBTP; /*!< FDCAN Nominal Bit Timing & Prescaler register, Address offset: 0x01C */
uint TSCC; /*!< FDCAN Timestamp Counter Configuration register, Address offset: 0x020 */
uint TSCV; /*!< FDCAN Timestamp Counter Value register, Address offset: 0x024 */
uint TOCC; /*!< FDCAN Timeout Counter Configuration register, Address offset: 0x028 */
uint TOCV; /*!< FDCAN Timeout Counter Value register, Address offset: 0x02C */
uint RESERVED2[4]; /*!< Reserved, 0x030 - 0x03C */
uint ECR; /*!< FDCAN Error Counter register, Address offset: 0x040 */
uint PSR; /*!< FDCAN Protocol Status register, Address offset: 0x044 */
uint TDCR; /*!< FDCAN Transmitter Delay Compensation register, Address offset: 0x048 */
uint RESERVED3; /*!< Reserved, 0x04C */
uint IR; /*!< FDCAN Interrupt register, Address offset: 0x050 */
uint IE; /*!< FDCAN Interrupt Enable register, Address offset: 0x054 */
uint ILS; /*!< FDCAN Interrupt Line Select register, Address offset: 0x058 */
uint ILE; /*!< FDCAN Interrupt Line Enable register, Address offset: 0x05C */
uint RESERVED4[8]; /*!< Reserved, 0x060 - 0x07C */
uint GFC; /*!< FDCAN Global Filter Configuration register, Address offset: 0x080 */
uint SIDFC; /*!< FDCAN Standard ID Filter Configuration register, Address offset: 0x084 */
uint XIDFC; /*!< FDCAN Extended ID Filter Configuration register, Address offset: 0x088 */
uint RESERVED5; /*!< Reserved, 0x08C */
uint XIDAM; /*!< FDCAN Extended ID AND Mask register, Address offset: 0x090 */
uint HPMS; /*!< FDCAN High Priority Message Status register, Address offset: 0x094 */
uint NDAT1; /*!< FDCAN New Data 1 register, Address offset: 0x098 */
uint NDAT2; /*!< FDCAN New Data 2 register, Address offset: 0x09C */
uint RXF0C; /*!< FDCAN Rx FIFO 0 Configuration register, Address offset: 0x0A0 */
uint RXF0S; /*!< FDCAN Rx FIFO 0 Status register, Address offset: 0x0A4 */
uint RXF0A; /*!< FDCAN Rx FIFO 0 Acknowledge register, Address offset: 0x0A8 */
uint RXBC; /*!< FDCAN Rx Buffer Configuration register, Address offset: 0x0AC */
uint RXF1C; /*!< FDCAN Rx FIFO 1 Configuration register, Address offset: 0x0B0 */
uint RXF1S; /*!< FDCAN Rx FIFO 1 Status register, Address offset: 0x0B4 */
uint RXF1A; /*!< FDCAN Rx FIFO 1 Acknowledge register, Address offset: 0x0B8 */
uint RXESC; /*!< FDCAN Rx Buffer/FIFO Element Size Configuration register, Address offset: 0x0BC */
uint TXBC; /*!< FDCAN Tx Buffer Configuration register, Address offset: 0x0C0 */
uint TXFQS; /*!< FDCAN Tx FIFO/Queue Status register, Address offset: 0x0C4 */
uint TXESC; /*!< FDCAN Tx Buffer Element Size Configuration register, Address offset: 0x0C8 */
uint TXBRP; /*!< FDCAN Tx Buffer Request Pending register, Address offset: 0x0CC */
uint TXBAR; /*!< FDCAN Tx Buffer Add Request register, Address offset: 0x0D0 */
uint TXBCR; /*!< FDCAN Tx Buffer Cancellation Request register, Address offset: 0x0D4 */
uint TXBTO; /*!< FDCAN Tx Buffer Transmission Occurred register, Address offset: 0x0D8 */
uint TXBCF; /*!< FDCAN Tx Buffer Cancellation Finished register, Address offset: 0x0DC */
uint TXBTIE; /*!< FDCAN Tx Buffer Transmission Interrupt Enable register, Address offset: 0x0E0 */
uint TXBCIE; /*!< FDCAN Tx Buffer Cancellation Finished Interrupt Enable register, Address offset: 0x0E4 */
uint RESERVED6[2]; /*!< Reserved, 0x0E8 - 0x0EC */
uint TXEFC; /*!< FDCAN Tx Event FIFO Configuration register, Address offset: 0x0F0 */
uint TXEFS; /*!< FDCAN Tx Event FIFO Status register, Address offset: 0x0F4 */
uint TXEFA; /*!< FDCAN Tx Event FIFO Acknowledge register, Address offset: 0x0F8 */
uint RESERVED7; /*!< Reserved, 0x0FC */