Alright. I created a Mikroe-type board for the Fez Flea. My program takes 52 seconds to initialise the power step01 motors, but I can’t wait that long in the event of an upset to retake control of the motors. So I will use the fast boot time of the Fez Flea to take basic safety control of the motors while waiting for the main controller to start up. It communicates via UART.
I consider this an SPI co-processor.
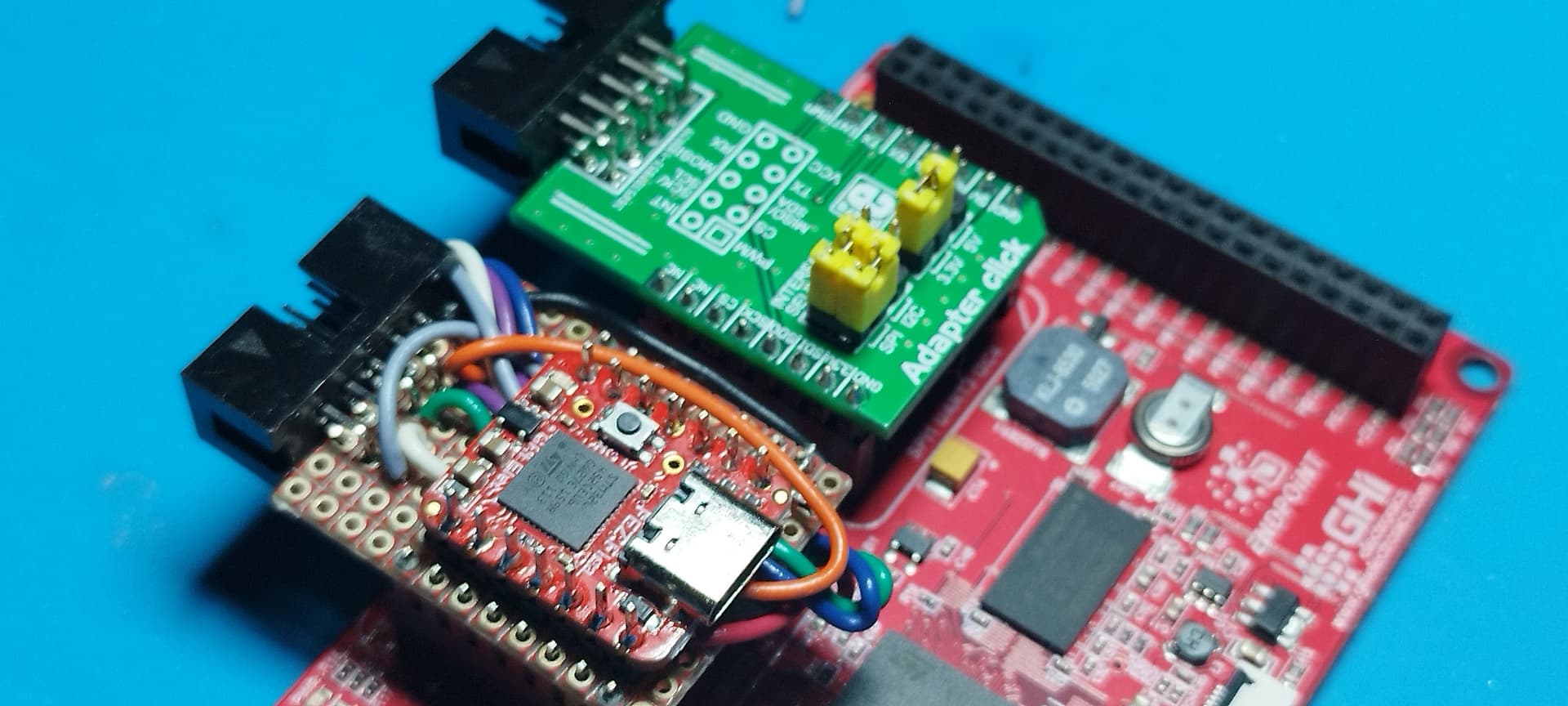
Does anyone see anything fundamentally wrong with this setup? Looking for advice, not praise. Thanks much.